Roboter und KI hautnah erleben

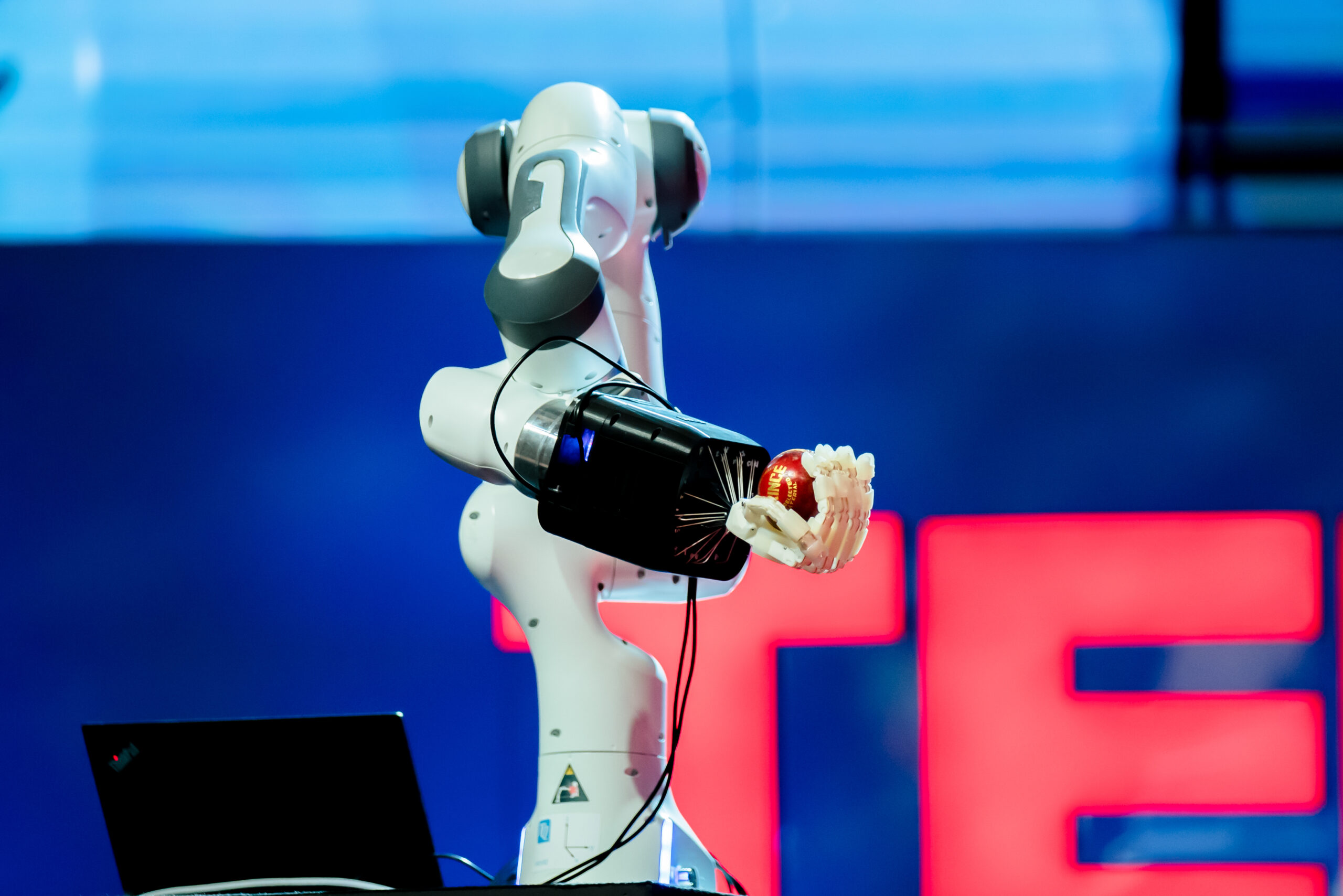
Unsere Roboterhände helfen Menschen in alltäglichen Situationen repetitive und gefährliche Aufgaben sicher und zuverlässig zu erledigen. Dabei lernt der Roboter mittels Künstlicher Intelligenz (KI) indem er das Verhalten seines Trainers beobachtet und kopiert. Sehen sie unseren Roboter in Aktion, erfahren Sie mehr über die Arbeit mit Roboter und KI.
Industrielle Roboter können heute praktisch nur in abgesperrten Bereichen eingesetzt werden, wo der Arbeitsbereich statisch und unveränderlich ist. Diese Einschränkung ergibt sich aus zwei Gründen: Erstens sind Roboter grösstenteils immer noch mit einfachen, aufgabenspezifischen Zwei- oder Dreifingergreifer ausgestattet, um mit der realen Welt zu interagieren. Zweitens ist das Programmieren von Robotern äusserst aufwendig, auch in technischer Hinsicht. Kommt hinzu, dass die Programmierung nur für eine strukturierte, statische Umgebung geeignet ist und Änderungen in der Umgebung oft eine Neuprogrammierung erfordern.
Wir gehen diese Herausforderungen mit unserem Ansatz wie folgt an: Um das Problem der aufgabenspezifischen Greifer zu lösen, haben wir unsere Lösung auf der Grundlage der menschlichen Hand entwickelt, um so vielseitig und robust wie möglich zu sein. Die Komplexität bei der Programmierung dieser Roboter lösen wir, indem wir unsere Roboterhand mit Hilfe eines kamerabasierten Handverfolgungssystems intuitiv steuerbar machen.
Unser Ziel ist es, die praktischsten Roboterhände zu bauen, die eine Vielzahl von Tätigkeiten in unstrukturierten Umgebungen mit menschlicher Geschicklichkeit ausführen können. Eine intuitive und einfach zu bedienende Schnittstelle macht dies möglich. Kommen Sie an unseren Stand und lernen Sie unsere Roboterhand kennen, die wir in der KI-Forschung zur Lösung von Aufgaben einsetzen, die für herkömmliche Roboter mit einfachen Greifern viel zu komplex sind.